How LiDAR Works
A LiDAR sensor contains a laser, a precise clock, and a detector. It emits a short pulse of invisible light, then listens for the reflection bouncing back off whatever the beam hit. Because the speed of light is known and constant, the instrument can convert the round-trip travel time into an exact distance to that surface.
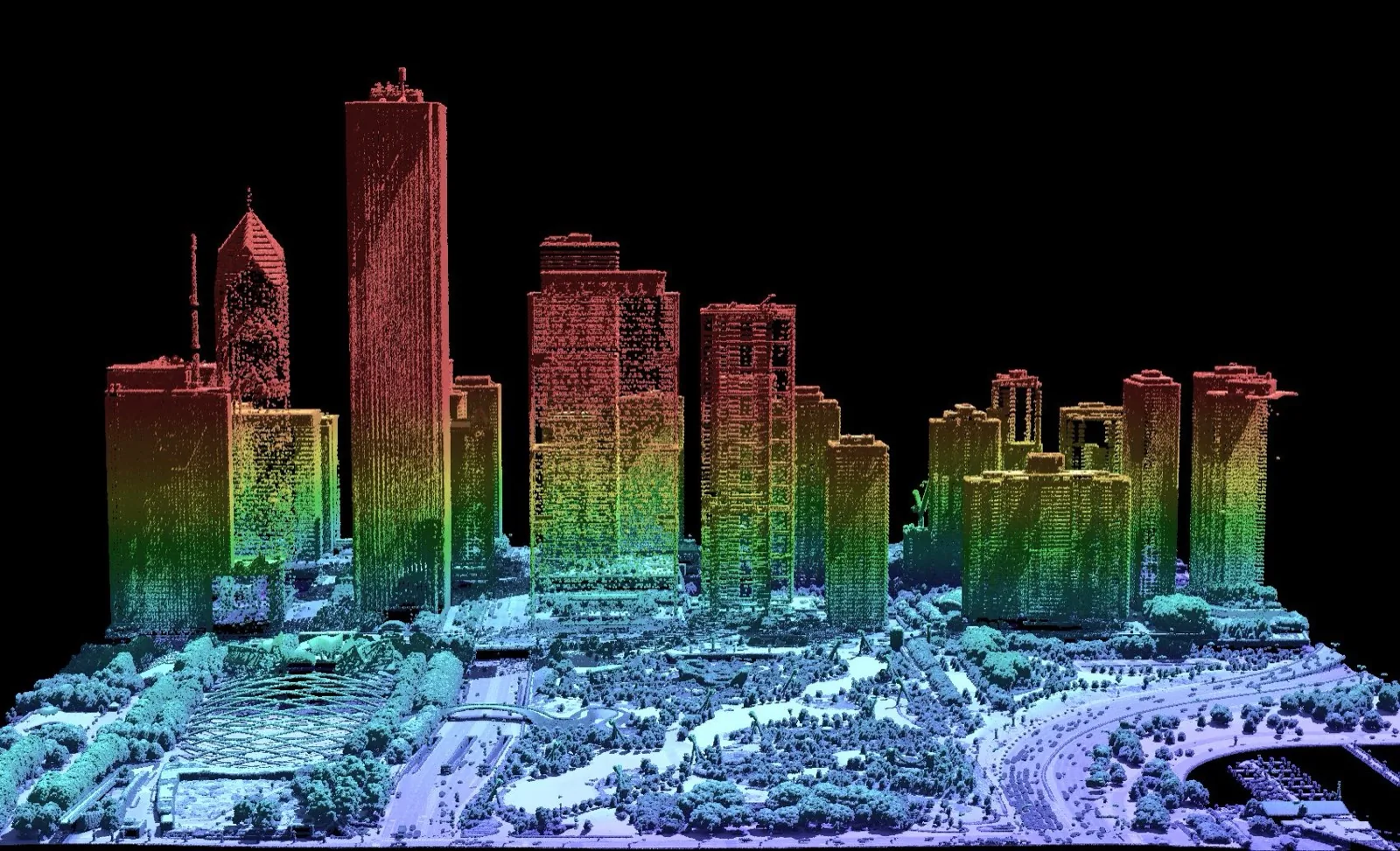
On its own, that is a single range measurement. The power of LiDAR comes from doing it extremely fast — hundreds of thousands to millions of pulses per second — while a mirror, prism, or solid-state beam steerer sweeps the laser across the scene. Pair each range with the sensor’s exact orientation and position (from an IMU and GNSS on a moving platform) and every pulse becomes one 3D point. Together they form the point cloud.
Time-of-Flight Ranging
The most common technique is time of flight: the sensor measures the elapsed time between emitting a pulse and detecting its echo, then halves it (the light traveled to the target and back) and multiplies by the speed of light.
A second method, phase-shift ranging, sends a continuously modulated beam and measures the phase difference between the outgoing and returning wave. Phase-shift scanners are typically very fast and precise at short to medium range, while pulsed time-of-flight scanners reach much farther — one reason there are so many different types of LiDAR.
Light is a fast tape measure
Light travels about 30 cm in one nanosecond. To measure position to the centimeter, a LiDAR has to time its pulses to a fraction of a nanosecond — which is exactly why the onboard clock and electronics are the heart of the instrument.
Multiple Returns
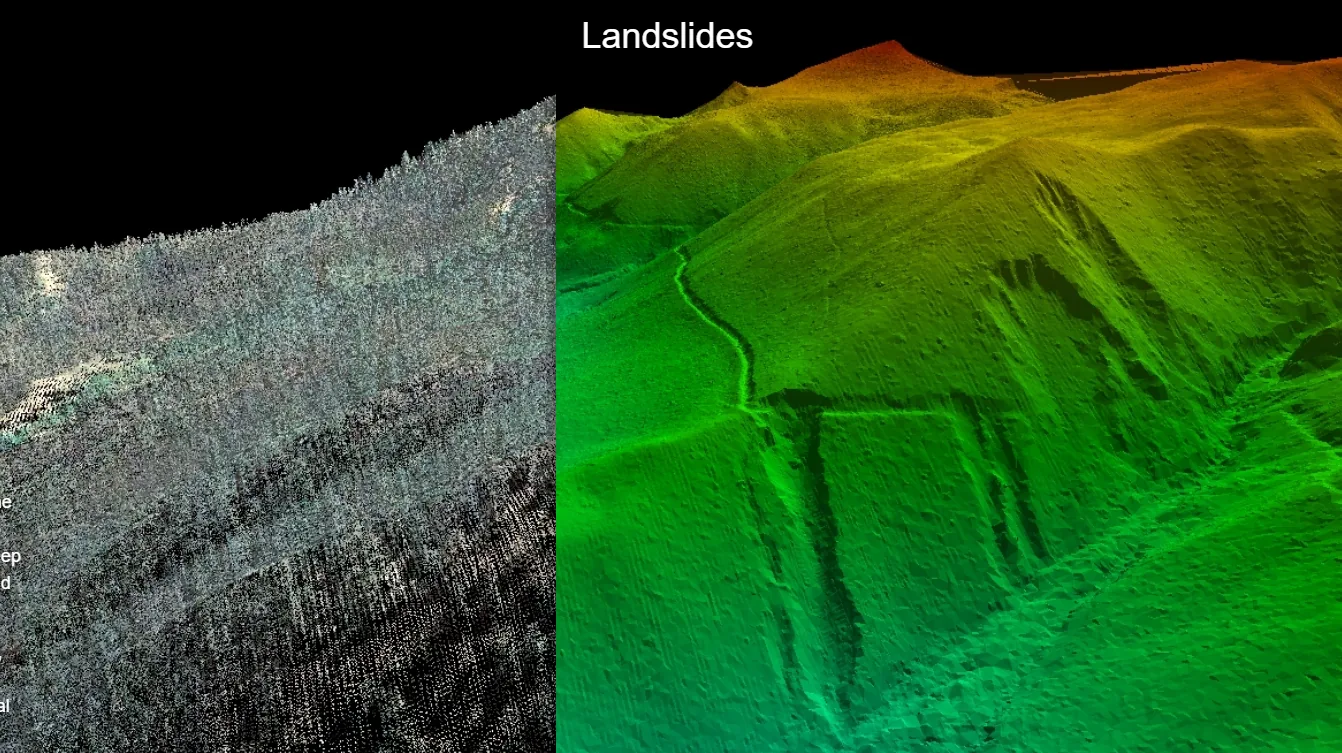
A single laser pulse is not infinitely thin, and it does not always hit one solid surface. Fired into a tree, part of the beam reflects off the upper leaves, part off lower branches, and part reaches the ground through the gaps. A LiDAR can record several returns from one pulse — first, intermediate, and last.
This is LiDAR’s superpower for mapping. The first returns describe the canopy or rooftops; the last returns often reach the bare earth beneath vegetation. Filtering to the ground returns lets surveyors build a clean terrain model where a camera would only ever see treetops.
Wavelength Matters
Most topographic LiDAR uses near-infrared light (commonly around 905 or 1550 nm). Infrared reflects well off land, vegetation, and buildings — but water absorbs it almost completely, so infrared LiDAR effectively sees water as a void.
To map underwater, bathymetric LiDAR switches to a green wavelength (about 532 nm) that penetrates clear water and reflects off the bottom. The choice of wavelength also affects eye-safety class, performance in sunlight, and how the system behaves against dark or wet surfaces — covered further in Types of LiDAR.
Point Density and Accuracy
Two numbers describe a LiDAR dataset more than any others:
- Point density — how many points fall per square meter (or the spacing between them). Denser clouds resolve finer detail: curbs, wires, rebar, leaf structure.
- Accuracy — how closely each point matches reality, split into absolute accuracy (correct position in the real world, which depends on the GNSS/IMU solution and control) and relative accuracy (how true the cloud is to itself).
A short-range indoor scanner might deliver millimeter precision over a few meters, while an airborne system trades per-point precision for the ability to cover square kilometers in a single flight. There is no single “best” LiDAR — only the right one for the range, detail, and platform a job demands.
Intensity is a free extra channel
Besides distance, LiDAR records how strong each return was. This intensity value tracks how reflective the surface is — bright paint, retro-reflective signs, and wet asphalt all stand out — and is often used to read lane markings or sort materials straight from the point cloud.
Where LiDAR Is Used
- Surveying & mapping — topographic terrain models, floodplain mapping, corridor and utility surveys.
- Construction & AEC — as-built scans, BIM, volume and progress monitoring.
- Forestry — canopy height, biomass, and bare-earth terrain beneath cover.
- Autonomy & robotics — real-time obstacle detection for vehicles and drones.
- Mining & underground — void and cavity scanning where it is unsafe to send a person.
- Heritage & archaeology — documenting structures and revealing buried landscapes under forest.
Whatever the platform, the output is the same currency: a measured 3D point cloud you can survey, model, and analyze. NDEVR works with LiDAR across the full range of hardware — see our guide to choosing a LiDAR system for specific sensors.